This is what we’re building:
A light-following robot. This one turns its motors on and off to follow the light from a torch:
Goal:
Build a robot body and use our Zombiebot to save humanity.
Materials:
- Everything from Challenge Five
- 1x Bamboo Chassis
- 4x zip ties
- Blutac
Overview:

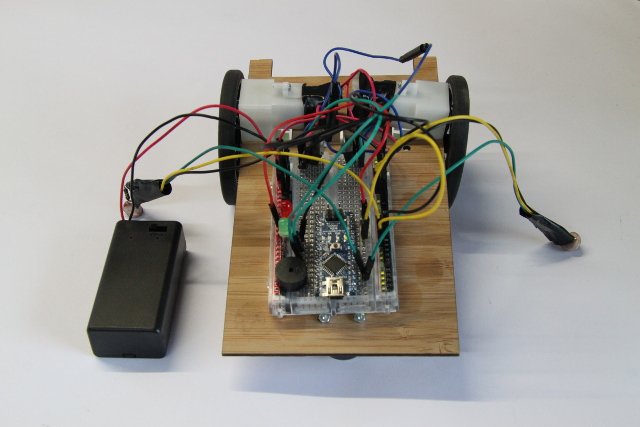
Fig. 1 Your Arduino robot and bamboo ply chassis
In the last challenge you built most of your robot: light sensors, 9v power & transistors, motor, gearbox & wheels. Now let’s build a body for your robot to sit on.
Instructions:
For complete visual instructions, click here.
- Turn the battery on and test your light sensors, motors, power etc. to make sure everything is working. Pop your bamboo chassis out of its surround, strip the paper off it, and set it up so the ball bearing is pointing down and at the rear.
- Fix your breadboard/Arduino to the top of the chassis with a bit of blutac (Fig. 2). Place your motor/gearbox units into the slots so the red jumpers on the motors point to the front of the robot and the blue jumpers point to the back (Fig. 2). Once they are in place correctly, use the zip ties to secure them in place. (Snip the long ends off the zip ties once you have pulled them tight to hold the motors in place.)
- Use the rest of the blutac to stick the battery to the front of the chassis (Fig. 3).
-

Fig 2. Click the image for detailed instructions
Attach your light sensors to the bumps on the front of the robot (up in front of the wheels), and set them up so that when you cover the left light sensor, the left motor goes forward (not the right motor) and vice versa. This means when the robot heads into a corner, the correct motor will turn on to steer it out into the light. If the right motor goes when you cover the left sensor, swap the light sensors over.
-

Fig 3. Click the image for detailed instructions
Attach your light sensors to the bumps on the front of the robot (up by the wheels), and set them up so that when you cover the left light sensor, the left motor goes forward (not the right motor) and vice versa. This means when the robot heads into a corner, the correct motor will turn on to head it out into the light. If the right motor goes when you cover the left sensor, swap the light sensors over.
You will use these skills later by:
Saving humankind from Zombies!
